Projects
Competition - MATE 2025
Wobbegong
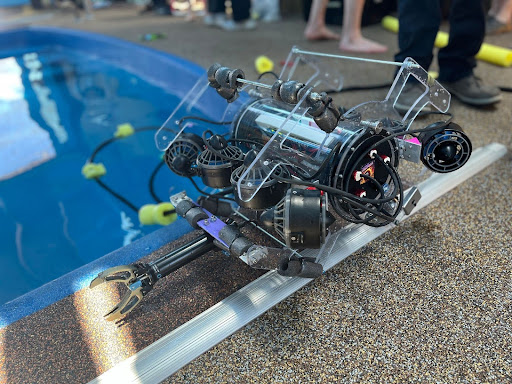
Wobbegong was designed to be extremely editable. With an open frame and plenty of attachment points for tools and payloads, Wobbegong was an extremely capable base platform, able to be quickly fitted for new tasks and missions. Utilizing a repurposed roboRIO and IMU module from our FRC days, Wobbegong was the first of our robots to utilize active stabilization measures.
Competition - MATE 2024
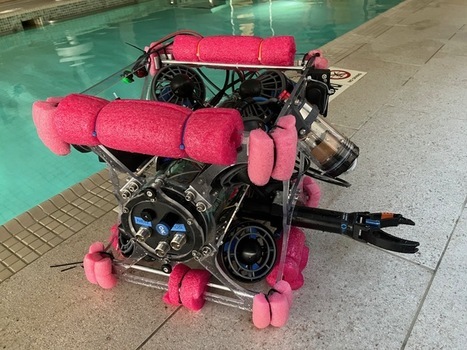
Mako

This year we went with a completely new design; Mako didn't have a conventional frame, instead utilizing a set of rails around the drybox which served as adjustable attachment points for the thrusters, camera, and manipulator. Designed for power and finesse, Mako was capable of extremely fast forward movement and precise rotation.
Mako Technical DocumentationCompetition - MATE 2023
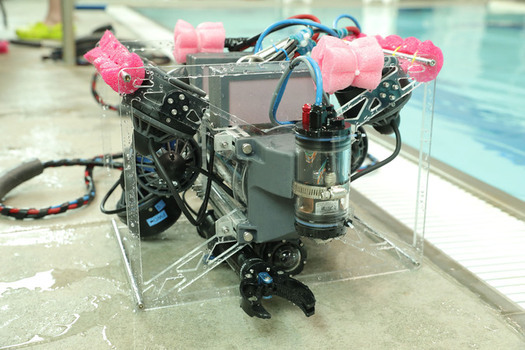
Bubbles
An iteration of the earlier Boxfish ROV, Bubbles utilized a similar frame structure, but with 8 thrusters placed at the corners of the frame, allowing for near-symmetrical movement in any orientation. Designed to have a pair of cameras and manipulators on both sides, Bubbles was able to quickly shift between tasks with ease, not requiring precious time to swing around to face the new focus.
Bubbles Technical DocumentationCompetition - MATE 2022
Boxfish
Our first design with an external frame, Boxfish was sturdy and robust, with a camera setup that gave an incredible view of our gripper, allowing us to easily and precisely manipulate surrounding objects. With 6 thrusters and modular buoyancy modules, Boxfish was a manuerverable, versatile robot.
Boxfish Technical DocumentationCompetition - MATE 2021
Hammerhead
The team's first foray into the MATE ROV Competition, Hammerhead was a simple, yet capable design. With a variety of tools to complete task, including two manipulators and an extendable tape measure for reaching into tight spaces, Hammerhead blazed the way for all of our future designs.
Hammerhead Technical DocumentationCompetition - FRC 2020
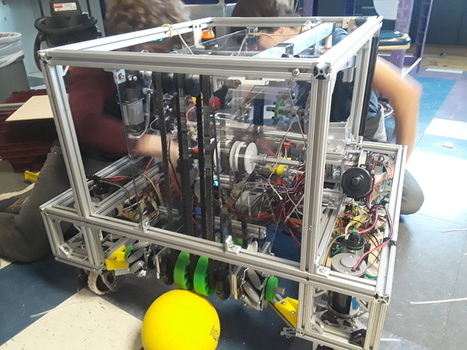
Gary
Competition - FRC 2019
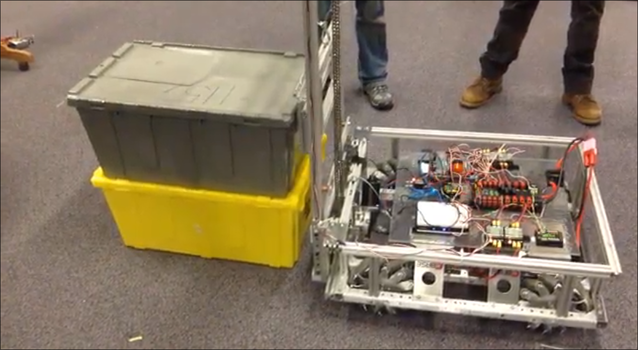
TallStack II

Competition - FRC 2018
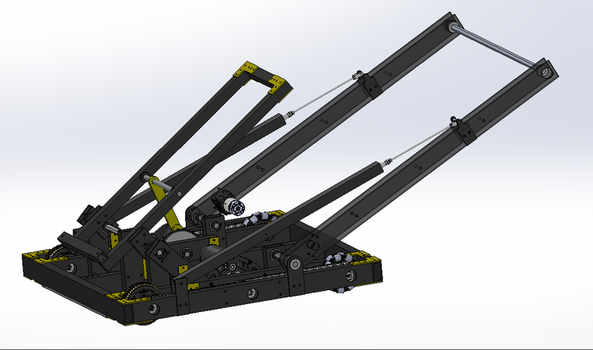
TallStack

Competition - FRC 2017
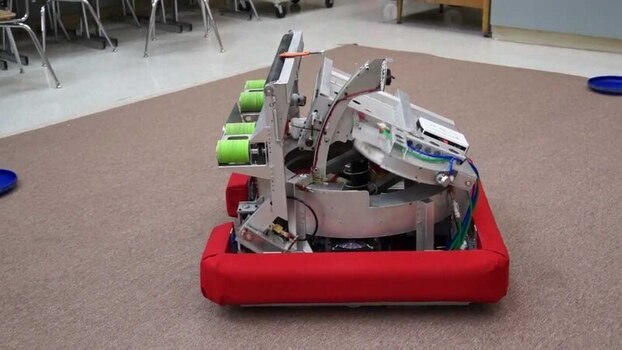
Nautilus

Competition - FRC 2016
FRC 2016

Competition - FRC 2015
Recycle Rush
Competition - FRC 2014
Competition - FRC 2013
Competition - FRC 2012

Competition - FRC 2011
Competition - FRC 2010

Competition - FRC 2009
Competition - FRC 2008

Competition - FRC 2007

Competition - FRC 2006

Competition - FRC 2005

Competition - FRC 2004

Competition - FRC 2003

Jenny
Beefed-Up Shopping Cart

Thing
Articulated Hand Robot

Vision - 2007
1157 has seen the light
"This year has been going very well for us. We think we are about a week to a week and a half from a fully functioning robot and… We have turned into a moth that can’t stay away from the little green light. http://www.youtube.com/watch?v=xx1p7XGtWFE That is our 2006 robot fully functional and tracking the light. We have made several circuits of our computer lab since we got it running. It will back off if the light moves too high and will move forward if the light gets too low. The driving has also been integrated with the light so that we can translate sideways and forward/backward while still facing the light to make it easier to place tubes during normal play. This year’s bot will have an almost identical drive train so updating the code will involve some gain changes but otherwise be “effortless”." -taken from chiefdelphi post 77041
Sandshark
Overland Long Distance Rover
